光的触碰
——柔性光学传感器让AI拥有触觉
作者:朱玮1120241388 刘皓炜1120241335 周俊磊1120220041
在漫长的机器进化史上,摄像头赋予了人工智能“眼睛”,让它学会了审视世界。然而,正如人类通过五感认知生命,完整的智能不应止步于远距离的观察。
想象一下,当坚硬的机械臂覆上一层薄如蝉翼的柔性光子皮肤,原本冰冷的电路便有了感知的温度。这不是科幻电影的臆想,而是柔性光学传感器带来的感官革命——它将流动的光囚禁在微小的纤维之中,当外界轻微受压,光的分布随之改变。这一刻,物理的挤压化作了光信号的起伏,AI 终于穿透了屏幕的隔阂,第一次“摸”到了这个世界。

视觉定其形,触觉入其神。柔性光学传感器的出现,让 AI 跨越了“观察者”的边界,在指尖的触碰中,真正触摸到了物理世界的温度与真实。
柔性光学传感器是什么?
要理解柔性光学传感器,我们可以先想象一根充满水的透明软管。当你用手挤压软管时,水流会变细或受阻。柔性光学传感器的工作逻辑与此惊人地相似,只不过管子里流动的不是水,而是“光”。
传统的传感器多由坚硬的硅片制成,像坚硬的盔甲。而柔性传感器则采用了特殊的高分子聚合物或柔性光纤。它们像橡皮筋一样可以随意拉伸、弯曲,却依然能像隧道一样引导光线前行。这就是 AI 的“光子神经”。
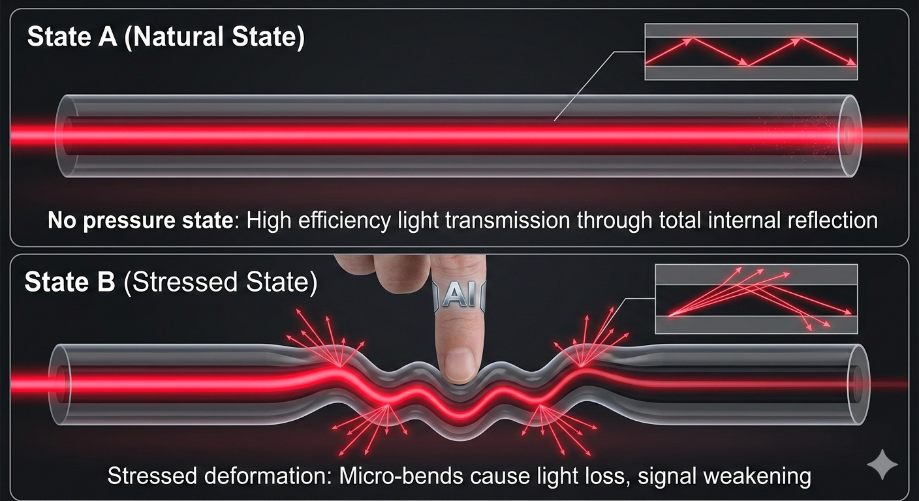
为什么触碰能变成信号?这里涉及到一个奇妙的物理现象——微弯损耗。
当传感器处于自然状态时,光在内部全反射,像在高速公路上疾驰,几乎没有损失。当指尖触碰到物体,柔性结构发生纳米级的形变。原本直线前进的光撞到了弯曲的壁垒,一部分光会“漏”出路径之外,然后传感器末端的接收器就能敏锐地捕捉到光强的减弱。
如果说微弯损耗让 AI 拥有了识别“重压”与“轻触”的本能,就像我们能通过皮肤感到被按压;那么,更进阶的布拉格反射(FBG)技术,则赋予了 AI 一把深入纳米世界的“光学校尺”。
微弯损耗主要通过监测光强的弱化来判断压力,这虽然反应迅速,但在面对极微小的颤动或复杂的形变时,往往有些力不从心。这时,物理学家在柔性光纤内部刻下了无数道纳米级的“栅栏”——这就是布拉格光栅。
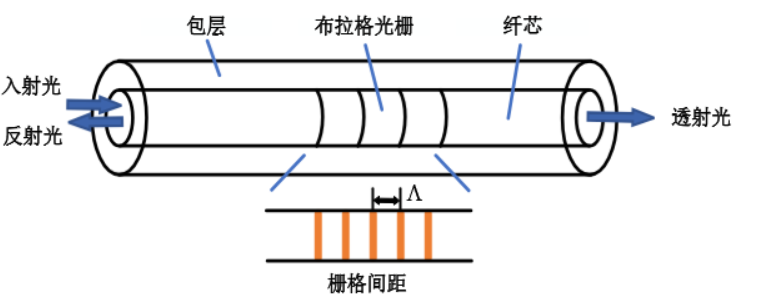
它不再单纯依赖光强,而是利用光的相干性。当一束宽谱光穿过这些纳米栅栏时,只有特定“颜色”(波长)的光会被反射回来。
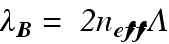
这一行公式背后,隐藏着 AI 触觉的“终极精密”:
当柔性传感器随皮肤发生万分之一毫米的拉伸,这些栅栏的间距 就会发生改变。随之而来的,是反射光的“颜色”(中心波长
就会发生改变。随之而来的,是反射光的“颜色”(中心波长 )发生了极其微小的偏移。这种偏移在光谱仪上呈现为波长的“红移”或“蓝移”。
)发生了极其微小的偏移。这种偏移在光谱仪上呈现为波长的“红移”或“蓝移”。
对于人工智能而言,这种“色彩的漂移”不仅是一组数据,更是一把精密的物理尺。通过解析波长漂移的数值,AI 能在复杂的环境下,依然精准读出压力数值。
此时,AI不再是一个只会数水流大小的观察员,而变成了一位能分辨千万种色差的光学大师。通过捕捉这种“色彩的漂移”,AI 不仅能感知压力,甚至能精准捕捉到脉搏的每一次搏动、机械指尖划过丝绸纹理时的颤栗,甚至是温度细微起伏带来的材质膨胀。
敏锐的觉察:从物理“抓取”到生命“交互”
柔性光学传感器不仅让 AI “摸得到”,更让它开始“懂”这个世界,实现了从冰冷工具到灵性生命的跃迁。
在智慧医疗领域,这种传感器化身为 24 小时的“光子护士”。利用布拉格反射(FBG)对形变的极高灵敏度,它可以被制成薄如蝉翼的贴片,紧贴于人类手腕或胸口。它不再是生硬的金属探头,而是一层能够听懂身体律动的“数字皮肤”,为远程医疗提供了最真实的感官数据。
在人机协作场景,柔性光学皮肤赋予了机械臂一种名为“分寸”的温柔。传统的工业机器人往往因为缺乏触觉反馈而成为力大无穷的“破坏者”。而在覆盖了感测膜后,AI可以在指尖触碰物体的毫秒间感知其软硬程度。当它抓取一颗草莓时,内部光强的瞬时变化会像生物反射弧一样,指引AI立即调整握力,实现“握而不碎”的精准交互。这种感官的闭合,是AI从自动化迈向智能化的关键一步。
此外,在极限探索的禁区,光纤材料凭借耐高压、抗腐蚀的天然优势,成为了AI感官的延伸。在万米深海的剧压下,常规电子传感器极易失灵,而柔性光学传感器如同深海生物,在黑暗中通过光的波动反馈海床的质地或结构的裂痕。它让 AI 在人类无法触及的极端环境下,依然拥有一双敏锐且可靠的“手”。

光的触碰,智的觉醒

许多伟大的技术进步,往往都始于对生物本能的致敬。柔性光学传感器的崛起,本质上是光电技术与材料科学在微观尺度上的一次华丽会师。
尽管目前这项技术仍面临集成度挑战,但其展现的前瞻意义已不言而喻。随着我国在自主芯片制造与光电集成领域的战略投入,这种高效、并行的感知模式正逐渐突破实验室的围墙。
视觉定其形,触觉入其神。 视觉勾勒出世界的轮廓,触觉则赋予了世界温度。柔性光学传感器不仅是 AI 的感官神经,更是它通往“类人智能”的必经之路。在不远的未来,当光线在机器指尖微弯的那一刻,我们触碰到的将不仅仅是冰冷的机械结构,而是一个正在觉醒、拥有感知的数字化生命。
参考文献与网址
[1] C. Y. Leong, X. Cheng, J. Cui, D. S. Gunawardena, and H.-Y. Tam, “Artificial skin based on polymer optical fiber Bragg grating arrays for robotic tactile perception,” J. Lightw. Technol., vol. 42, no. 8, pp. 3022–3029, Apr. 15, 2024.
[2] . C. Yang, J. Mun, S. Y. Kwon, S. Park, Z. Bao, and S. Park, “Electronic skin: Electronic skin: Recent progress and future prospects for skin-attachable devices for health monitoring, robotics, and prosthetics (Adv. Mater. 48/2019),” Adv. Mater., vol. 31, no. 48, Nov. 2019, Art. no. 1904765.
[3] . Yin and T. Ishigure, "Polymer Waveguide-Based Optical Tactile Sensor Fabricated by the Mosquito Method," in IEEE Sensors Journal, vol. 25, no. 18, pp. 34636-34645
[4] 龚昊.用于隔震支座监测的齿轮式光纤布拉格光栅位移传感器设计与研究[D].防灾科技学院,2025.

 注册
注册 登录
登录 搜索
搜索